Aucun produit
À définir
Livraison
0,00 €
Total
Les prix sont HT
NOS SERVICES
LA SOCIÉTÉ
INFORMATION
| AFFICHEURS | CONVERSION D'ÉNERGIE |
|
|||||
| COMPOSANTS PASSIFS | OPTO-ÉLECTRONIQUE | ||||||
|
|||||||
| COMPOSANT INFORMATIQUE | SYSTÈME EMBARQUÉ |
|
|||||
| STOCKAGE ET MÉMOIRE INDUSTRIELS | SOLUTION D'AFFICHAGE | ||||||
|
|||||||
| MODULES CONNECTORISES RF | INSTRUMENTATION RF |
|
|||||
| INTERCONNEXION RF ET OPTIQUE | COMPOSANTS ET CIRCUITS INTÉGRÉS RF | ||||||
|
|||||||
| INSTRUMENTATION GENERALE | MESURE RF ET HYPERFREQUENCE |
|
|||||||
| OPTIQUE ET TELECOMS | AUDIO & ACOUSTIQUE | ||||||||
|
|||||||||
| LOGICIELS | MATÉRIELS | SERVICES |
|
|||||||
|
| NOTRE ACCOMPAGNEMENT ET NOTRE EXPERTISE | NOS VALEURS AJOUTEES |
NOS SOLUTIONS ET REALISATIONS |
|
|||||||
|
|
| ENVIRONNEMENT | LABORATOIRE |
|
|||||
| PROCESS & CONTRÔLE INDUSTRIEL | APPLICATIONS UV & SOLAIRE | ||||||
|
|||||||
| Aérospatiale / Défense | Automobile | Contrôle / Maintenance | Education / Recherche |
 |
 |
 |
 |
| Electronique Grand Public | Environnement | Energie | Industries |
 |
 |
 |
 |
| Transport | Laboratoire / R&D | Médical | Réseau & Télécom |
 |
 |
 |
 |

LIVRAISON En cours de réapprovisionnement
Attention : dernières pièces disponibles !

Nous vous contacterons pour valider votre commande quand le produit sera disponible.
Date de disponibilité :
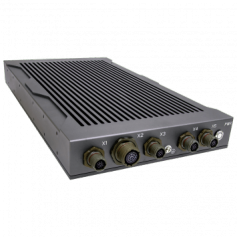
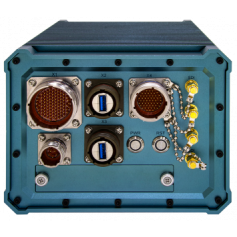
De l'ADAS (Advanced Driver - Assistance Systems) à l'autonomie complète de niveau 5, avec un accent particulier sur l'intelligence artificielle, l'apprentissage machine, les capteurs, l'unité de calcul gère le contrôle principal des véhicules autotractés, comme la conversion de l'entrée du papillon des gaz en demandes de couple, la surveillance des systèmes de sécurité, les boucles de contrôle et la limitation de puissance.
Par conséquent, les véhicules autonomes (AV) pourraient contribuer à rendre la mobilité future plus efficace, plus sûre et plus propre.
Spécifications :
Comment fonctionne le véhicule autonome :
Les 3 actions des capteurs :